![]() 設計支援ソフトウェア
設計支援ソフトウェア
- 対応規格:指定なし
- Language:日本語
- エリア:アジア・オセアニア
- 小数点記号:. (123.45)
設計支援ソフトウェア
選択内容を確認する
- 対応規格 指定なし
- Language 日本語
- エリア アジア・オセアニア
- 小数点記号 . (123.45)
電動アクチュエータ選定ソフト
STEP
|
分類選択 |
|
コントローラ選択 |
|
シリーズ選択 |
|
負荷条件選択 |
|
条件入力 |
|
品番選択 |
|
選定結果 |
選定方法を選択してください。
-
簡易機器選定

-

アクチュエータから選定
-

コントローラから選定
-
サイクルタイム計算
タイプを選択してください。
-

ロータリテーブル
-

グリッパ
シリーズを選択してください。
スライダ
-

LEFS: スライダタイプ/ボールねじ駆動

スライドテーブル
-

LESH: スライドテーブル高剛性タイプ
-

LESYH: スライドテーブル/高精度タイプ
ロッド
-

LEPY: ミニチュアロッドタイプ
スライドテーブル
-

LEPS: ミニチュアスライドテーブルタイプ
ロータリテーブル
-

LER: ロータリテーブル基本形
-
LERH: ロータリテーブル高精度形
-

LER-1: ロータリテーブル基本形/連続回転仕様
-
LERH-1: ロータリテーブル高精度形/連続回転仕様
グリッパ
-

LEHZ: グリッパ2爪タイプ
-

LEHZJ: グリッパ2爪タイプ/ダストカバー付
-

LEHF: グリッパ2爪タイプ/ロングストローク
スライドテーブル
-

LES: スライドテーブル薄形タイプ
ロッド
-

LEG: 高剛性ガイド付ロッドタイプ
スライダ
-

LEFB: スライダタイプ/ベルト駆動
-

LEJS: 高剛性スライダタイプ/ボールねじ駆動
-

LEJB: 高剛性スライダタイプ/ベルト駆動
-

LEL: ガイドロッドスライダタイプ/ベルト駆動
-

LEMB: 薄形スライダタイプ/基本形
-

LEMC: 薄形スライダタイプ/カムフォロア形
-

LEMH: 薄形スライダタイプ/リニアガイド1軸形
-

LEMHT: 薄形スライダタイプ/リニアガイド2軸形
-
LEKFS: スライダタイプ高剛性ガイド
ロッド
-

LEY: ロッドタイプ
-

LEYG: ガイド付ロッドタイプ
グリッパ
-

LEHS: グリッパ3爪タイプ
シリーズを選択してください。
-
LEFS: スライダタイプ/ボールねじ駆動
-
LEFB: スライダタイプ/ベルト駆動
-
LEJS: 高剛性スライダタイプ/ボールねじ駆動
-
LEJB: 高剛性スライダタイプ/ベルト駆動
-
LEL: ガイドロッドスライダタイプ/ベルト駆動
-
LEMB: 薄形スライダタイプ/基本形
-
LEMC: 薄形スライダタイプ/カムフォロア形
-
LEMH: 薄形スライダタイプ/リニアガイド1軸形
-
LEMHT: 薄形スライダタイプ/リニアガイド2軸形
-
LEKFS: スライダタイプ高剛性ガイド
-

シリーズを指定しない
| シリーズ | モータ種類 | 標準/受注生産ストローク mm |
最大搬送質量 kg |
速度 mm/s |
|
|---|---|---|---|---|---|
| 水平 | 垂直 | ||||
| LEFS | ステップモータ | 50~1200 | 75 | 25 | 5~1500 |
| サーボモータ | 50~800 | 18 | 5 | 1~800 | |
| ACサーボモータ | 50~1200 | 60 | 30 | 1~1500 | |
| LEFB | ステップモータ | 300~2000 | 19 | - | 48~1500 |
| サーボモータ | 300~2000 | 2 | - | 5~2000 | |
| ACサーボモータ | 300~3000 | 25 | - | 1~2000 | |
| LEJS | ACサーボモータ | 200~1500 | 400 | 80 | 1~2300 |
| LEJB | ACサーボモータ | 200~3000 | 30 | - | 1~3000 |
| LEL | ステップモータ | 100~1000 | 5 | - | 48~1000 |
| LEMB | ステップモータ | 50~2000 | 11 | - | 48~1000 |
| LEMC | ステップモータ | 50~2000 | 20 | - | 48~1000 |
| LEMH | ステップモータ | 50~1500 | 20 | - | 48~2000 |
| LEMHT | ステップモータ | 50~1500 | 20 | - | 48~2000 |
| LEKFS | ステップモータ | 50~1200 | 75 | 25 | 5~1500 |
| ACサーボモータ | 50~1200 | 60 | 30 | 1~1500 | |
-
LEY: ロッドタイプ
-
LEYG: ガイド付ロッドタイプ
-
LEG: 高剛性ガイド付ロッドタイプ
-
LEPY: ミニチュアロッドタイプ
-

シリーズを指定しない
| シリーズ | モータ種類 | 標準/受注生産ストローク | 最大搬送質量 kg |
速度 mm/s |
押当て推力 N |
ストッパ用途 搬送物質量 kg |
ストッパ用途 搬送物速度 m/min |
|
|---|---|---|---|---|---|---|---|---|
| 水平 | 垂直 | |||||||
| LEY | ステップモータ | 30~500 | 100 | 53 | 4~800 | 14~1058 | - | - |
| サーボモータ | 30~400 | 30 | 12 | 1~500 | 16~130 | - | - | |
| ACサーボモータ | 30~1000 | 1200 | 200 | 1~1200 | 65~12000 | - | - | |
| LEYG | ステップモータ | 30~300 | 90 | 51 | 4~500 | 14~1058 | 0~75 | 0~30 |
| サーボモータ | 30~300 | 30 | 11 | 1~500 | 16~130 | 0~45 | 0~30 | |
| ACサーボモータ | 30~300 | 60 | 44 | 1~1200 | 65~736 | 0~75 | 0~30 | |
| LEPY | ステップモータ | 25~75 | 6 | 1.5 | 10~350 | 7~50 | - | - |
| LEG | ステップモータ | 30~100 | 60 | 27 | 18~250 | 7~50 | 0~150 | 0~40 |
-
LES: スライドテーブル薄形タイプ
-
LESH: スライドテーブル高剛性タイプ
-
LESYH: スライドテーブル/高精度タイプ
-
LEPS: ミニチュアスライドテーブルタイプ
-

シリーズを指定しない
| シリーズ | モータ種類 | 標準/受注生産ストローク mm |
最大搬送質量 kg |
速度 mm/s |
押当て推力 N |
|
|---|---|---|---|---|---|---|
| 水平 | 垂直 | |||||
| LES | ステップモータ | 30~150 | 5 | 5 | 10~400 | 4~180 |
| サーボモータ | 30~150 | 5 | 4 | 1~400 | 5~62 | |
| LESH | ステップモータ | 50~150 | 12 | 4 | 10~400 | 4~180 |
| サーボモータ | 50~150 | 6 | 2.5 | 1~400 | 5~62 | |
| LEPS | ステップモータ | 25~50 | 2 | 1.5 | 10~350 | 7~50 |
| LESYH | ステップモータ | 50~150 | 12 | 20 | 5~800 | 18~765 |
| ACサーボモータ | 50~100 | 12 | 20 | 10~400 | 65~385 | |
-
LER: ロータリテーブル基本形
-
LERH: ロータリテーブル高精度形
-
LER-1: ロータリテーブル基本形/連続回転仕様
-
LERH-1: ロータリテーブル高精度形/連続回転仕様
-
シリーズを指定しない
| シリーズ | モータ種類 | 揺動角度 ° |
最大回転トルク N・m |
最大押当トルク N・m |
最大慣性モーメント kg・m² |
角速度 °/s |
|---|---|---|---|---|---|---|
| LER | ステップモータ | 320 | 10 | 5 | 0.13 | 20~420 |
| LERH | ステップモータ | 320 | 10 | 5 | 0.13 | 20~420 |
| LER-1 | ステップモータ | 360 | 10 | 5 | 0.13 | 20~420 |
| LERH-1 | ステップモータ | 360 | 10 | 5 | 0.13 | 20~420 |
-
LEHZ: グリッパ2爪タイプ
-
LEHZJ: グリッパ2爪タイプ/ダストカバー付
-
LEHF: グリッパ2爪タイプ/ロングストローク
-
LEHS: グリッパ3爪タイプ
-
シリーズを指定しない
| シリーズ | モータ種類 | ストローク(両側/直径) mm |
把持力 N |
最大オーバーハング量/把持点 mm |
開閉速度 mm/s |
押当て速度 mm/s |
|---|---|---|---|---|---|---|
| LEHZ | ステップモータ | 4~30 | 1.4~210 | 200 | 5~120 | 5~50 |
| LEHZJ | ステップモータ | 4~14 | 1.8~40 | 200 | 5~100 | 5~50 |
| LEHF | ステップモータ | 16~80 | 1.55~180 | 110 | 5~100 | 5~30 |
| LEHS | ステップモータ | 4~12 | 1.12~130 | 120 | 5~120 | 5~50 |
用途を選択してください。
-
搬送/位置決め
-
搬送/位置決め
-
押当て
-
ストッパ
-
搬送/位置決め
-
押当て
-
クランプ+揺動
-
揺動
-
払い出し
-
搬送/位置決め(2爪)
-
押当て(2爪)
-
搬送/位置決め(3爪)
-
押当て(3爪)
直線
-
搬送/位置決め
-
押当て
回転
-
クランプ+揺動
-
揺動
-
払い出し
把持
-
搬送/位置決め
-
押当て
ストッパ
-
ストッパ
条件を入力してください。
| 入力範囲 | |||
|---|---|---|---|
| 移動距離: | mm | [0.50 ~ 3000.00] | |
| 加速度: | mm/s² | [1 ~ 20000] | |
| 速度: | mm/s | [0.1 ~ 3000.0] | |
| 減速度: | mm/s² | [1 ~ 20000] | |
| 押当て開始位置: | mm | [0 ~ ] | |
| 押当て速度: | mm/s | [0.1 ~ 50.0] | |
| 整定時間: | |||
| 押当て検出時間: | |||
| 加速時間T1: | s | ||
| 等速時間T2: | s | ||
| 減速時間T3: | s | ||
| 整定時間T4: | s | ||
| 押当て時間T4: | s | ||
| 押当て検出時間T5: | s | ||
| サイクルタイムT: | s | ||
| 最大速度: | mm/s | ||
| 最大速度時変位: | mm | ||
| 最大角速度: | °/s | ||
| 最大角速度時角度: | ° |
用途を選択してください。
-
搬送/位置決め
-
搬送/位置決め
-
押当て
-
ストッパ
-
搬送/位置決め
-
押当て
-
クランプ+揺動
-
揺動
-
払い出し
-
搬送/位置決め(2爪)
-
押当て(2爪)
-
搬送/位置決め(3爪)
-
押当て(3爪)
取付姿勢を選択してください。
-
水平
-
天井
-
壁
-
垂直上向き
-
垂直下向き
条件を入力してください。
| 入力範囲 | |||
|---|---|---|---|
| 移動距離: | mm | [E ~ E] | |
| サイクルタイム: |
s | [E ~ E] | |
| 搬送質量: | kg | [E ~ E] | |
| 治具質量: | kg | [E ~ E] | |
| 押当て推力: | N | [E ~ E] |
| 入力範囲 | |||
|---|---|---|---|
| 移動距離: | mm | [E ~ E] | |
| サイクルタイム: |
s | [E ~ E] | |
| 搬送質量: | kg | [E ~ E] | |
| 治具質量: | kg | [E ~ E] | |
| 押当て推力: | N | [E ~ E] | |
| 治具質量: | kg | [E ~ E] | |
| 搬送質量: |
kg | [E ~ E] | |
| 搬送物速度: |
m/min | [E ~ E] |
| 入力範囲 | |||
|---|---|---|---|
| 開閉距離(両側): |
mm | [E ~ E] | |
| サイクルタイム: |
s | [E ~ E] | |
| 必要把持力: |
N | [E ~ E] |
| 入力範囲 | |||
|---|---|---|---|
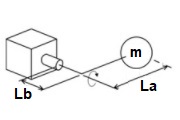
| 揺動角度: | ° | [E ~ E] | |
| サイクルタイム: |
s | [E ~ E] | |
| 負荷質量: |
kg | [E ~ E] | |
| 回転軸から負荷重心までの位置距離La: |
mm | [E ~ E] | |
| 取付面から負荷重心までの軸方向距離Lb: |
mm | [E ~ E] | |
| クランプ力: | N | [E ~ E] | |
| 揺動中心からクランプ位置までの距離L: |
mm | [E ~ E] | |
| 移動物質量: |
kg | [E ~ E] | |
| 揺動中心から移動物までの距離L: |
mm | [E ~ E] |
![]() 簡易機器選定では、負荷モーメントやデューティ比などの条件が、許容範囲内であることを前提として選定を行います。
簡易機器選定では、負荷モーメントやデューティ比などの条件が、許容範囲内であることを前提として選定を行います。
実際に使用できるかの判断は詳細機器選定に進んで行って下さい。
選定結果
| (確認用) ID |
(確認用) type_id |
(確認用) model_giken |
おすすめ順 | 品番 | 対応コントローラ | サイズ | リード mm |
位置決め精度 mm |
サイクルタイム | 可搬質量比率 | 可搬質量比率 | 押当て推力比率 | 仕様表示 | カタログ |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| (確認用) ID |
(確認用) type_id |
(確認用) model_giken |
おすすめ順 | 品番 | 対応コントローラ | サイズ | リード mm |
位置決め精度 mm |
サイクルタイム | 可搬質量比率 | 可搬質量比率 | 押当て推力比率 | 押当て推力 N |
搬送物質量比率 | 搬送物速度比率 | 仕様表示 | カタログ |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| (確認用) ID |
(確認用) type_id |
(確認用) model_giken |
おすすめ順 | 品番 | 対応コントローラ | サイズ | リード mm |
位置決め精度 mm |
サイクルタイム | フィンガ可動範囲 mm |
把持力 N |
把持力比率 | 仕様表示 | カタログ |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| (確認用) ID |
(確認用) type_id |
(確認用) model_giken |
おすすめ順 | 品番 | 対応コントローラ | サイズ | リード mm |
位置決め精度 mm |
サイクルタイム | 負荷質量比率 | 慣性モーメント比率 | 回転トルク比率 | 押当てトルク比率 | 仕様表示 | カタログ |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
簡易機器選定×
最小限の入力条件を元に、おすすめのアクチュエータを自動選定します。 ただし負荷モーメントやデューティ比などの条件が許容範囲内であることを前提として選定を行います。 実際に使用できるかの判断は詳細選定に進んで行って下さい。
アクチュエータから選定×
選択したアクチュエータシリーズの内、 入力した条件を満たす仕様および対応コントローラを自動選定します。 負荷モーメントやデューティー比などの仕様が、許容範囲を満たしているかの判断も含めた詳細選定を行います。
コントローラから選定×
入力した条件を満たすコントローラに対応した、アクチュエータを自動選定します。 負荷モーメントやデューティー比などの仕様が、許容範囲を満たしているかの判断も含めた詳細選定を行います。
特性計算×
指定した製品と入力条件から、許容範囲を満たしているかの判断を行い、応答時間を計算します。
サイクルタイム計算×
移動距離、速度、加減速度の入力に対して、サイクルタイムを計算します。 ただし、入力した値が製品の仕様を満たすかどうかの判断は行われません。
直線 搬送/位置決め×
現在位置から目標位置に向かって移動して、目標位置にて停止する動作です。 目標位置に対して設定した位置決幅の範囲に入ると目標値到達信号(INP出力信号)がONになります。 コントローラの設定項目で、押当推力を0に設定してください。
直線 押当て×
現在位置から目標位置(押当て開始位置)に向かって移動し、目標位置から設定した推力で押当てを行う動作です。 実効推力が設定したしきい値を超えると目標値到達信号(INP出力信号)がONになります。 コントローラの設定項目で、押当推力を0以外に設定してください。
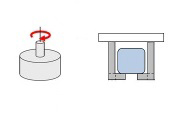
回転 クランプ+揺動×
現在角度から目標角度(押当て開始位置)に向かって回転し、目標角度から設定した推力でクランプを行う動作です。 実効推力が設定したしきい値を超えると目標値到達信号(INP出力信号)がONになります。 コントローラの設定項目で、押当推力を0以外に設定してください。
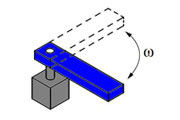
回転 揺動×
現在角度から目標角度に向かって回転して、目標角度にて停止する動作です。 目標角度に対して設定した位置決幅の範囲に入ると目標値到達信号(INP出力信号)がONになります。 コントローラの設定項目で、押当推力を0に設定してください。
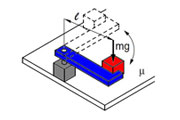
回転 払い出し×
現在角度から目標角度に向かって物体を移動させながら回転して、目標角度にて停止する動作です。 コントローラの設定項目で、押当推力を0以外に設定してください。
把持 搬送/位置決め×
現在位置から目標位置に向かって開方向もしくは閉方向に移動して、目標位置にて停止する動作です。 目標位置に対して設定した位置決幅の範囲に入ると目標値到達信号(INP出力信号)がONになります。 コントローラの設定項目で、押当推力を0に設定してください。
把持 押当て×
現在位置から目標位置(押当て開始位置)に向かって開方向もしくは閉方向に移動し、目標位置から設定した推力で把持を行う動作です。 実効推力が設定したしきい値を超えると目標値到達信号(INP出力信号)がONになります。 コントローラの設定項目で、押当推力を0以外に設定してください。
把持 搬送/位置決め(2爪)×
現在位置から目標位置に向かって開方向もしくは閉方向に移動して、目標位置にて停止する動作です。 目標位置に対して設定した位置決幅の範囲に入ると目標値到達信号(INP出力信号)がONになります。 コントローラの設定項目で、押当推力を0に設定してください。
把持 押当て(2爪)×
現在位置から目標位置(押当て開始位置)に向かって開方向もしくは閉方向に移動し、目標位置から設定した推力で把持を行う動作です。 実効推力が設定したしきい値を超えると目標値到達信号(INP出力信号)がONになります。 コントローラの設定項目で、押当推力を0以外に設定してください。
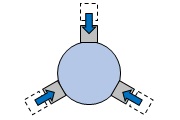
把持 搬送/位置決め(3爪)×
現在位置から目標位置に向かって開方向もしくは閉方向に移動して、目標位置にて停止する動作です。 3爪によって、円筒・球部品等円形のワークに対応します。 目標位置に対して設定した位置決幅の範囲に入ると目標値到達信号(INP出力信号)がONになります。 コントローラの設定項目で、押当推力を0に設定してください。
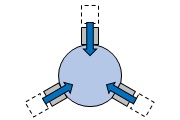
把持 押当て(3爪)×
現在位置から目標位置(押当て開始位置)に向かって開方向もしくは閉方向に移動し、目標位置から設定した推力で把持を行う動作です。 3爪によって、円筒・球部品等円形のワークに対応します。 実効推力が設定したしきい値を超えると目標値到達信号(INP出力信号)がONになります。 コントローラの設定項目で、押当推力を0以外に設定してください。
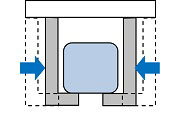
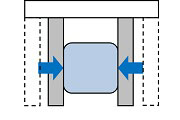
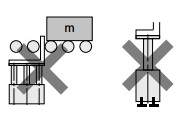
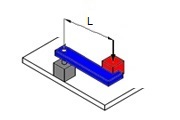
ストッパ×
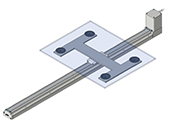
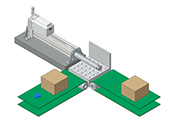
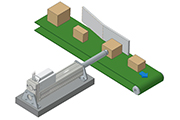
移動する搬送物をアタッチメントで停止させる動作です。 コントローラの設定項目で、押当推力を0に設定してください。 ・ストッパ用途で使用できるストロークは30以下です。 ・LEYG□L(ボールブッシュ軸受)はストッパとして使用できません。 ・ガイドロッド直列方向へのワーク衝突は使用できません。(図左) ・ストッパ用途で使用する場合には、本体は"端面取付"しないでください。 "上面/下面取付"にて取付けしてください。(図右)
サイクルタイム×
最大速度で動作時に、入力したサイクルタイム以下になるように加減速度を自動で算出し、製品を選定します。
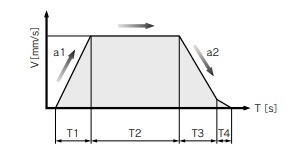
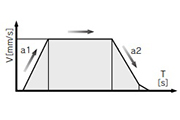
v:速度 T:時間 a1:加速度 a2:減速度 サイクルタイム=T1+T2+T3+T4 T1:加速時間 設定速度に到達するまでの時間。 T2:等速時間 一定速で運転している時間。 移動距離が短い場合には、設定速度に到達する前に減速を開始するため、等速時間がない場合があります。 T3:減速時間 設定速度から停止するまでの時間。 T4:整定時間 速度指令値がゼロになった後、停止するまでの時間。 モータ種類、負荷およびステップデータの位置決幅などの条件により異なりますが、参考値で計算します。
サイクルタイム×
最大速度で動作時に、入力したサイクルタイム以下になるように加減速度を自動で算出し、製品を選定します。
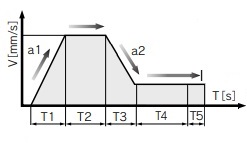
v:速度 T:時間 a1:加速度 a2:減速度 サイクルタイム=T1+T2+T3+T4+T5 T1:加速時間 設定速度に到達するまでの時間。 T2:等速時間 一定速で運転している時間。 移動距離が短い場合には、設定速度に到達する前に減速を開始するため、等速時間がない場合があります。 T3:減速時間 設定速度から停止する(または押当て速度)までの時間。 T4:押当て時間 押当て開始位置から設定した推力で押当て運転をしている時間。 T5:押当て検出時間 押当て運転完了をコントローラが判断している時間。 モータ種類、負荷及びステップデータのしきい値などの条件により異なりますが、参考値で計算します。
搬送物質量×
ストッパで停止させる搬送物の質量です。 質量が増加するほど、許容搬送物速度が低下します。
搬送物速度×
ストッパで停止させる搬送物の速度です。 速度が増加するほど、許容搬送物質量が低下します。
開閉距離(両側)×
開閉距離は両フィンガの移動距離です。片フィンガ当たりの移動距離は1/2となります。
開閉距離(直径)×
開閉距離は3フィンガによる直径の移動距離です。1フィンガ当たりの移動距離は1/2となります。
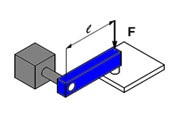
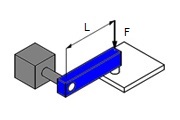
必要把持力×
把持力は、すべてのフィンガおよびアタッチメントがすべてのワークに接している状態での1つのフィンガの把持力です。
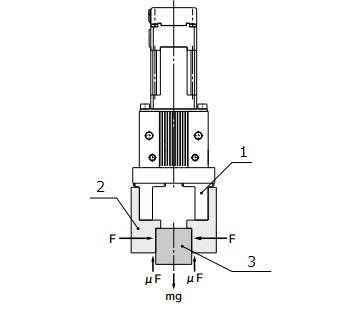
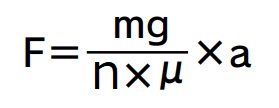
1:フィンガ 2:アタッチメント 3:ワーク 図のようにワークを把持するとき F :把持力(N) n :フィンガの数 μ:アタッチメント-ワーク間の摩擦係数 m:ワーク質量(kg) g:重力加速度(=9.8m/s2) a:余裕率(=4:当社推奨) とすると、必要把持力は、
・摩擦係数がμ=0.2よりも高い場合も、安全の為、摩擦係数μ=0.2にて選定してください。 ・大きな加速度や衝撃に対しては、余裕率をさらに大きく見込む必要があります。 〈参考〉摩擦係数μ(使用環境、面圧等により異なります。)
| 摩擦係数μ | アタッチメント-ワーク材質 (目安) |
|---|---|
| 0.1 | 金属 (表面粗さRz3.2以下) |
| 0.2 | 金属 |
| 0.2以上 | ゴム、樹脂 etc |
負荷質量×
アクチュエータと接続している治具および負荷すべての合計値を入力してください。
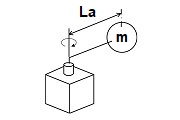
回転軸から負荷重心までの位置距離La×
距離Laが長いほど、必要トルクやモーメントが大きくなるため、許容負荷質量、許容角速度、許容角加速度、許容角減速度が低下します。
取付面から負荷重心までの軸方向距離Lb×
距離Lbが長いほどモーメント荷重が大きくなるため、許容負荷質量が小さくなります。
揺動中心からクランプ位置までの距離L×
距離Lが長いほど、必要トルクが大きくなるため、許容クランプ力Fが低下します。
移動物質量×
払い出しの際に、移動させる物体の質量です。
揺動中心から移動物までの距離L×
距離が長いほど、許容移動物質量が低下します。
リード×
モータが1回転(つまり送りねじが1回転)した時に移動する距離または角度です。 リードが大きいほど、速度(角速度)が速くできますが、搬送可能な質量(実効トルク)が小さくなります。
フィンガ可動範囲×
フィンガが可動する範囲です。周辺にあるワーク、設備等と干渉しないようにご注意ください。
サイクルタイムグラフ×
v:速度 T:時間 a1:加速度 a2:減速度 サイクルタイム=T1+T2+T3+T4 T1:加速時間 設定速度に到達するまでの時間。 T2:等速時間 一定速で運転している時間。 移動距離が短い場合には、設定速度に到達する前に減速を開始するため、等速時間がない場合があります。その場合は0が表示されます。 T3:減速時間 設定速度から停止するまでの時間。 T4:整定時間 速度指令値がゼロになった後、停止するまでの時間。 モータ種類、負荷およびステップデータの位置決幅などの条件により異なりますが、参考値で計算します。
サイクルタイムグラフ×
v:速度 T:時間 a1:加速度 a2:減速度 サイクルタイム=T1+T2+T3+T4+T5 T1:加速時間 設定速度に到達するまでの時間。 T2:等速時間 一定速で運転している時間。 移動距離が短い場合には、設定速度に到達する前に減速を開始するため、等速時間がない場合があります。その場合は0が表示されます。 T3:減速時間 設定速度から停止する(または押当て速度)までの時間。 T4:押当て時間 押当て開始位置から設定した推力で押当て運転をしている時間。 T5:押当て検出時間 押当て運転完了をコントローラが判断している時間。 モータ種類、負荷及びステップデータのしきい値などの条件により異なりますが、参考値で計算します。
選定結果×
製品仕様
| 品番: | |
|---|---|
| シリーズ: | |
| 動作方式: | |
| フィンガ可動範囲: | mm |
| ストローク: | mm |
| リード: | mm |
| モータ配置: | |
| 精度: | |
| モータタイプ: | |
| モータサイズ: | |
| 電源電圧: | |
| ガイド種類: | |
| 駆動方式: | |
| 最低使用温度: | ℃ |
| 最高使用温度: | ℃ |
| 繰返し位置決め精度: | mm |
| ロストモーション: | |
| バックラッシ: | |
| 質量: | kg |
| 質量(ロックなし/ロック付): | kg |
| ロック付仕様消費電力: | W |
| 最大電力: | W |
選定結果×
対応コントローラ
スライドテーブル薄形タイプ×

|
ステップモータ (サーボDC24V)/サーボモータ (DC24V)タイプ ・薄形:LESHと比較しワーク取付高さ 最大12%減 ・垂直可搬質量:MAX.50%UP ・軽量:最大29%減 ・最大押当て推力:180N ・繰返し位置決め精度:±0.05mm ・タクトタイムの短縮が可能 最大加減速度:5000mm/s2 最大速度:400mm/s バッテリレス アブソリュートエンコーダタイプ ・停止位置からの再始動が可能 ・電源復帰時の運転再開を容易に! 電源遮断時でもエンコーダが位置情報を保持しているため、電源再投入時の原点復帰は不要。 ・バッテリ非搭載によりメンテナンス軽減 位置情報保持にバッテリを使用しないため、予備バッテリの管理やメンテナンス交換が不要。 ・最大押当て推力:180N ・繰返し位置決め精度:±0.05mm ・タクトタイムの短縮が可能 最大加減速度:5000mm/s2 最大速度:400mm/s |
スライドテーブル高剛性タイプ×

|
ステップモータ (サーボDC24V)/サーボモータ (DC24V)タイプ ・簡単設定:位置と速度の2項目で設定完了 コントローラはアクチュエータ仕様を設定出荷 (アクチュエータ、コントローラセット販売) ・ガイドレールとテーブルを一体化 循環式リニアガイド採用で高剛性・高精度 ・タクトタイムの短縮 最大加減速度:5000mm/s2 最大速度:400mm/s ・最大押当て推力:180N ・繰返し位置決め精度:±0.05mm バッテリレス アブソリュートエンコーダタイプ ・停止位置からの再始動が可能 ・電源復帰時の運転再開を容易に! 電源遮断時でもエンコーダが位置情報を保持しているため、電源再投入時の原点復帰は不要。 ・バッテリ非搭載によりメンテナンス軽減 位置情報保持にバッテリを使用しないため、予備バッテリの管理やメンテナンス交換が不要。 ・ガイドレールとテーブルを一体化。 循環式リニアガイド採用で高剛性・高精度。 ・タクトタイムの短縮。 最大加減速度:5000mm/s2/最大速度:400mm/s ・最大押当て推力:180N ・繰返し位置決め精度:±0.05mm |
スライドテーブル/高精度タイプ×

|
バッテリレス アブソリュートエンコーダタイプ ・停止位置からの再始動が可能 ・電源復帰時の運転再開を容易に! 電源遮断時でもエンコーダが位置情報を保持しているため、電源再投入時の原点復帰は不要。 ・バッテリ非搭載によりメンテナンス軽減 位置情報保持にバッテリを使用しないため、予備バッテリの管理やメンテナンス交換が不要。 ・ボールねじ駆動により 繰返し位置決め精度±0.01mm ・ロストモーション:0.1mm以下 ・垂直可搬質量向上:5倍以上 高タクト対応バッテリーレスアブソリュート(ステップモータDC24V)タイプ ・サイクルタイムの短縮が可能:従来比39%削減 ・加減速度:10000mm/s2(従来比200%) ・最大速度:800mm/s(従来比200%向上) ・電源復帰時の運転再開を容易に! 電源遮断時でもエンコーダが位置情報を保持しているため、電源再投入時の原点復帰は不要。 ACサーボモータタイプ ・高出力モータ (100W/200W) ・高速搬送能力向上 ・高加減速度 (5000mm/s2) ・繰返し位置決め精度:±0.01mm |
ミニチュアロッドタイプ×

|
・小型・軽量 W20.5mm×H30mm×L125.6mm、質量240g (LEPY6[]-25) ・最大押当て推力:50N ・繰返し位置決め精度:±0.05mm ・位置・速度・推力の設定 (64点) ・最大速度 (水平):350mm/s |
ミニチュアスライドテーブルタイプ×

|
・小型・軽量 W21mm×H41mm×L138.6mm、質量290g (LEPS6[]-25) ・最大押当て推力:50N ・繰返し位置決め精度:±0.05mm ・位置・速度・推力の設定 (64点) ・最大速度 (水平):350mm/s |
ロータリテーブル基本形×

|
・揺動角度:320°、310°、180°、90° ・薄型:高さ寸法42mm (LER10) ・モータ内蔵により省スペース ・ショックレス・高速駆動 最大速度:420°/sec (7.33rad/sec) 最大加減速度:3000°/sec2 (52.36rad/sec2) ・速度、加/減速度、位置決め最大64点 ・省エネ:テーブル停止後、電力40%自動低減 ・簡単設定:位置と速度の2項目で設定完了 コントローラはアクチュエータ仕様を設定出荷 (アクチュエータ、コントローラセット販売) バッテリレス アブソリュートエンコーダタイプ ・停止位置からの再始動が可能 ・電源復帰時の運転再開を容易に! 電源遮断時でもエンコーダが位置情報を保持しているため、電源再投入時の原点復帰は不要。 ・バッテリ非搭載によりメンテナンス軽減 位置情報保持にバッテリを使用しないため、予備バッテリの管理やメンテナンス交換が不要。 ・揺動角度:320º、180º、90º ・モータ内蔵により省スペース ・ショックレス・高速駆動 最大速度:420º/sec 最大加減速度:3000º/sec2 |
ロータリテーブル高精度形×

|
・揺動角度:320°、310°、180°、90° ・高精度軸受によりテーブルのラジアル、スラスト方向への移動量を低減 ・繰返し位置決め精度:±0.03° ・薄型:高さ寸法42mm (LER10) ・モータ内蔵により省スペース ・ショックレス・高速駆動 最大速度:420°/sec (7.33rad/sec) 最大加減速度:3000°/sec2 (52.36rad/sec2) ・速度、加/減速度、位置決め最大64点 ・省エネ:テーブル停止後、電力40%自動低減 ・簡単設定:位置と速度の2項目で設定完了 コントローラはアクチュエータ仕様を設定出荷 (アクチュエータ、コントローラセット販売) バッテリレス アブソリュートエンコーダタイプ ・停止位置からの再始動が可能 ・電源復帰時の運転再開を容易に! 電源遮断時でもエンコーダが位置情報を保持しているため、電源再投入時の原点復帰は不要。 ・バッテリ非搭載によりメンテナンス軽減 位置情報保持にバッテリを使用しないため、予備バッテリの管理やメンテナンス交換が不要。 ・揺動角度:320º、180º、90º ・モータ内蔵により省スペース ・ショックレス・高速駆動 最大速度:420º/sec 最大加減速度:3000º/sec2 |
ロータリテーブル基本形/連続回転仕様×

|
・揺動角度:360° ・角度設定範囲:±20000000° ・薄型:高さ寸法42mm (LER10) ・モータ内蔵により省スペース ・ショックレス・高速駆動 最大速度:420°/sec (7.33rad/sec) 最大加減速度:3000°/sec2 (52.36rad/sec2) ・速度、加/減速度、位置決め最大64点 ・省エネ:テーブル停止後、電力40%自動低減 ・簡単設定:位置と速度の2項目で設定完了 コントローラはアクチュエータ仕様を設定出荷 (アクチュエータ、コントローラセット販売) |
ロータリテーブル高精度形/連続回転仕様×

|
・揺動角度:360° ・角度設定範囲:±20000000° ・高精度軸受によりテーブルのラジアル、スラスト方向への移動量を低減 ・繰返し位置決め精度:±0.03° ・薄型:高さ寸法42mm (LER10) ・モータ内蔵により省スペース ・ショックレス・高速駆動 最大速度:420°/sec (7.33rad/sec) 最大加減速度:3000°/sec2 (52.36rad/sec2) ・速度、加/減速度、位置決め最大64点 ・省エネ:テーブル停止後、電力40%自動低減 ・簡単設定:位置と速度の2項目で設定完了 コントローラはアクチュエータ仕様を設定出荷 (アクチュエータ、コントローラセット販売) |
グリッパ2爪タイプ×

|
・簡単設定:位置と推力の2項目で設定完了 コントローラはアクチュエータ仕様を設定出荷 (アクチュエータ、コントローラセット販売) ・落下防止機能付 ・セルフロックにより、消費電力を低減 ・把持確認機能付 ・位置・速度・力の設定 (64点) |
グリッパ2爪タイプ/ダストカバー付×

|
・簡単設定:位置と推力の2項目で設定完了 コントローラはアクチュエータ仕様を設定出荷 (アクチュエータ、コントローラセット販売) ・落下防止機能付 (全シリーズセルフロック機能付) ・セルフロックにより、消費電力を低減 ・把持確認機能付 ・位置・速度・力の設定 (64点) |
グリッパ2爪タイプ/ロングストローク×

|
ステップモータタイプ ・簡単設定:位置と推力の2項目で設定完了 コントローラはアクチュエータ仕様を設定出荷 (アクチュエータ、コントローラセット販売) ・落下防止機能付 ・セルフロックにより、消費電力を低減 ・把持確認機能付 ・位置・速度・力の設定 (64点) バッテリレス アブソリュートエンコーダタイプ ・停止位置からの再始動が可能 ・電源復帰時の運転再開を容易に! 電源遮断時でもエンコーダが位置情報を保持しているため、電源再投入時の原点復帰は不要。 ・バッテリ非搭載によりメンテナンス軽減 位置情報保持にバッテリを使用しないため、予備バッテリの管理やメンテナンス交換が不要。 ・落下防止機能付(全シリーズセルフロック機能付) ・セルフロックにより、消費電力を低減。 ・把持確認機能付。 |
グリッパ3爪タイプ×

|
・簡単設定:位置と推力の2項目で設定完了 コントローラはアクチュエータ仕様を設定出荷 (アクチュエータ、コントローラセット販売) ・落下防止機能付 (全シリーズセルフロック機能付) ・セルフロックにより、消費電力を低減 ・把持確認機能付 ・位置・速度・力の設定 (64点) |
| 国(地域) | 言語 | アクチュエータ |
|---|---|---|
| 日本 | 日本語 | カタログ |
| 英語 | カタログ | |
| 中国 | 簡体字中国語 | カタログ |
| 韓国 | 韓国語 | カタログ |
| EU | 英語 | カタログ |
| ドイツ語 | カタログ | |
| フランス語 | カタログ | |
| スペイン語 | カタログ | |
| イタリア語 | カタログ | |
| ポーランド語 | カタログ | |
| チェコ語 | カタログ |
Version:2.3.02
: 2025/11/11
Copyright © SMC Corporation. All Rights Reserved.